


大家好,我是二哥呀。
PaiCLI 的第 1 期我们已经实现了,一个基础的 ReAct Agent,能一步一步执行任务,一边思考一边行动。
但这种方式有个问题:复杂任务需要很多轮对话,每一步都需要调用 LLM。
比如“创建一个 Spring Boot 项目,写个 REST API,然后打包运行”这个任务:
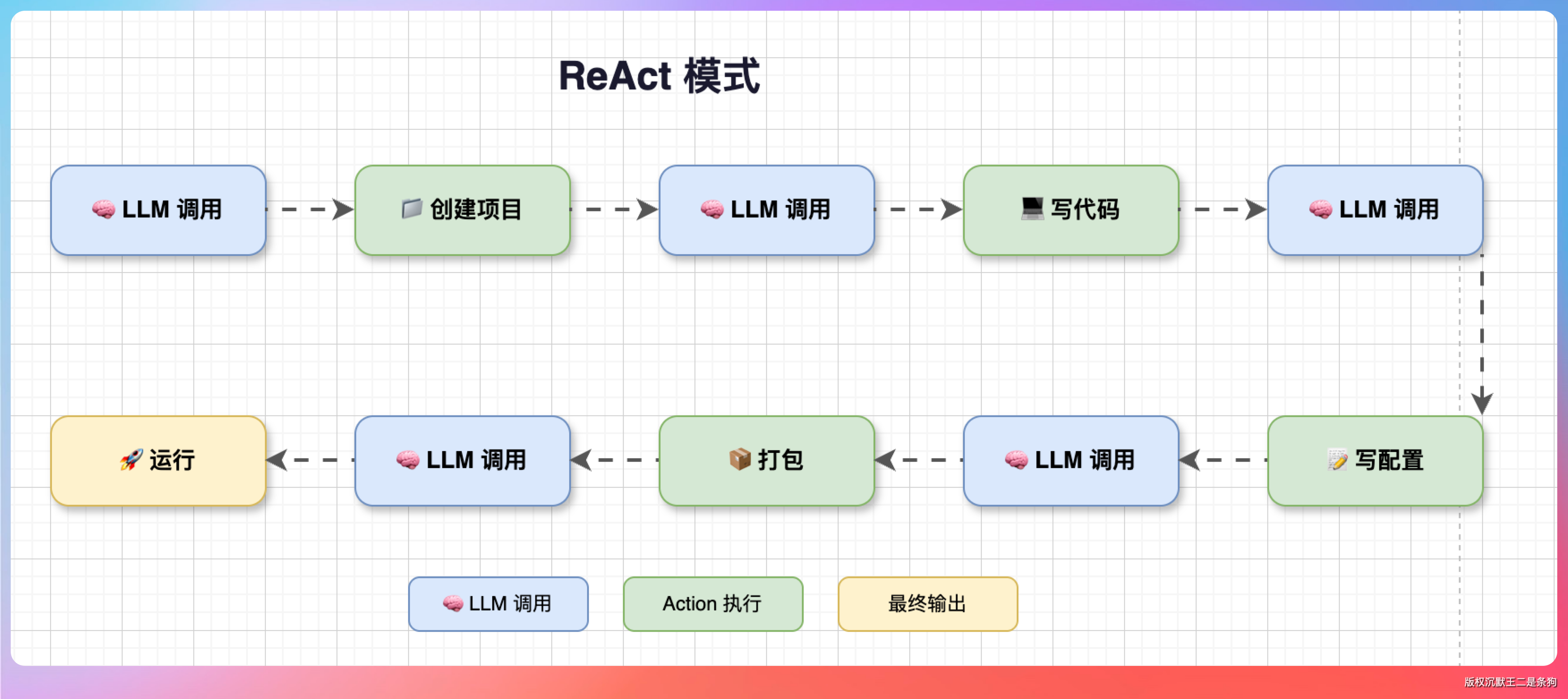
一共要调用 5 次 LLM,每次都要等网络往返。
第 2 期,我们来实现 Plan-and-Execute 模式:先让 LLM 制定完整计划,然后按步骤执行,中间不再反复询问 LLM。
01、Plan-and-Execute 的核心思想
Plan-and-Execute 模式来自论文《Plan-and-Solve Prompting》。
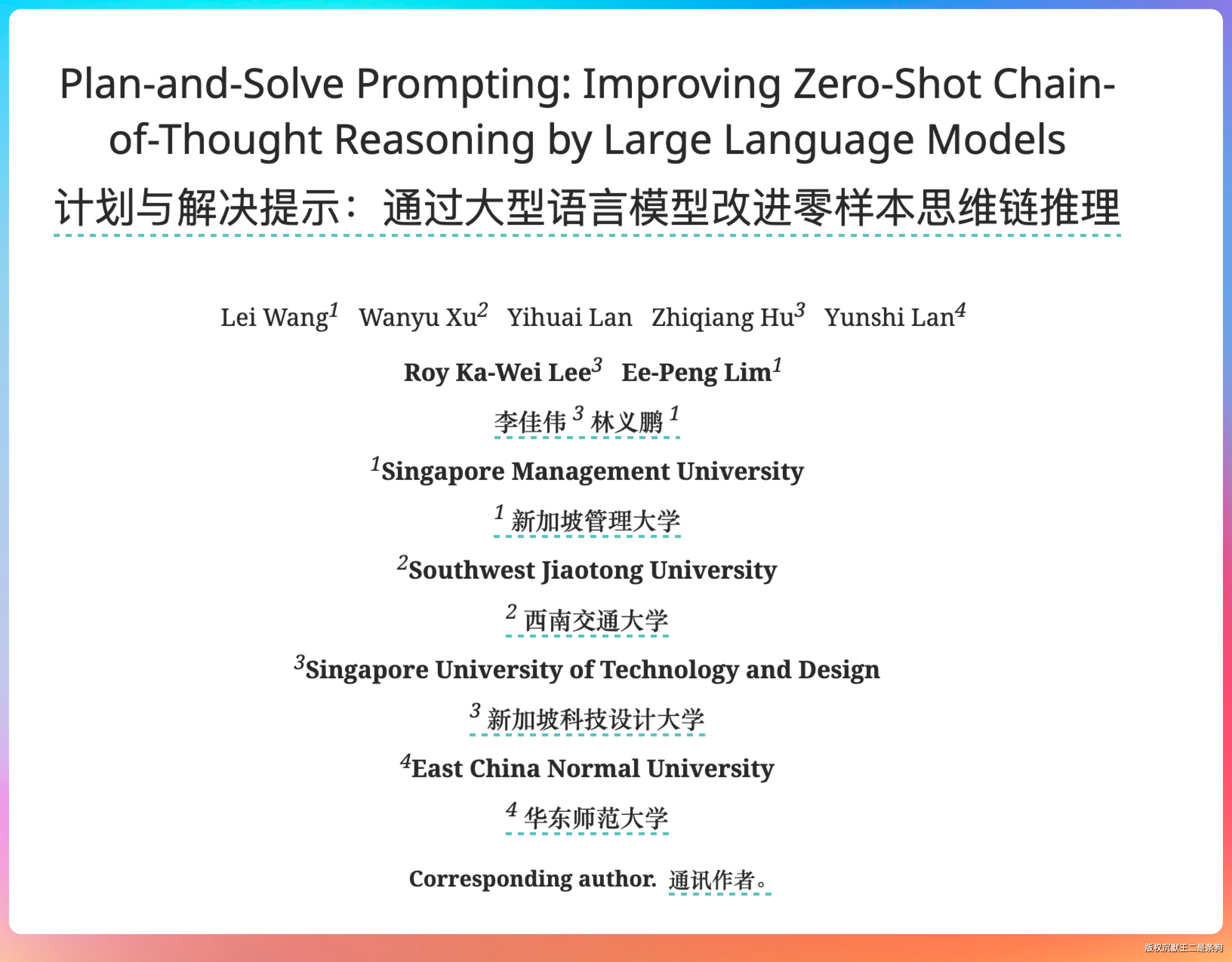
核心思想是规划和执行分离。
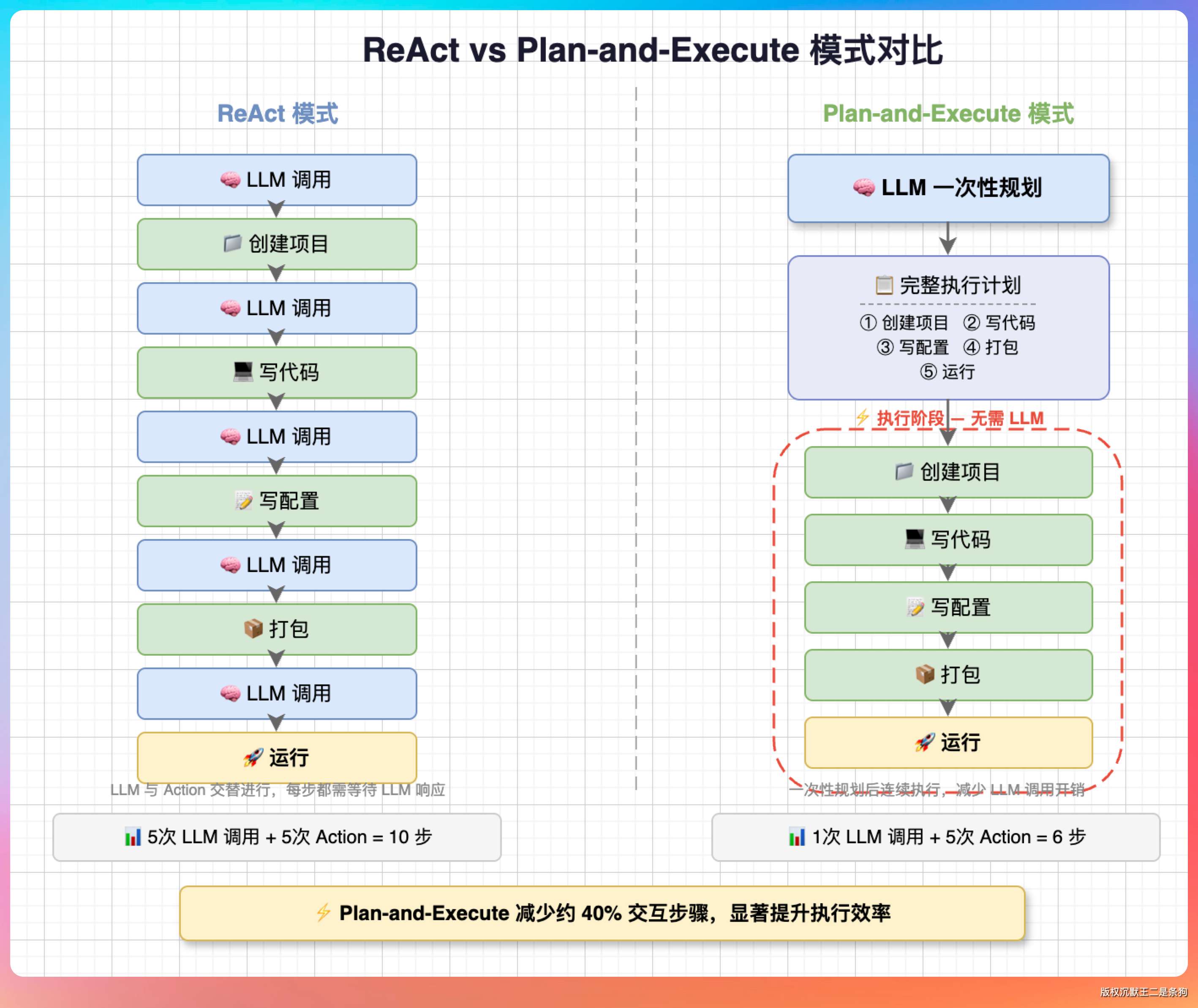
这样做的好处有:
- 减少 LLM 调用次数:规划一次,执行多次
- 可预测性更强:提前知道整个执行流程
- 支持并行执行:识别无依赖的任务并行处理
- 失败可重试:某步失败可以单独重试,不用从头来
代价是灵活性降低,如果执行过程中发现计划有问题,需要重新规划。
02、任务建模
要实现 Plan-and-Execute,首先要定义什么是“任务”。
为什么需要任务建模
在 ReAct 模式中,任务隐含在对话历史中。LLM 通过阅读历史消息知道当前该做什么。但这种方式有两个问题:
第一,上下文膨胀。复杂任务需要很多轮对话,随着历史消息越来越长,Token 的消耗剧增。
第二,状态不清晰。对话历史里混杂了思考过程、工具调用、执行结果,很难一眼看出任务执行到哪一步。
任务建模把“做什么”和“怎么做”分离开来。计划阶段确定“做什么”(任务列表),执行阶段解决“怎么做”(具体执行)。
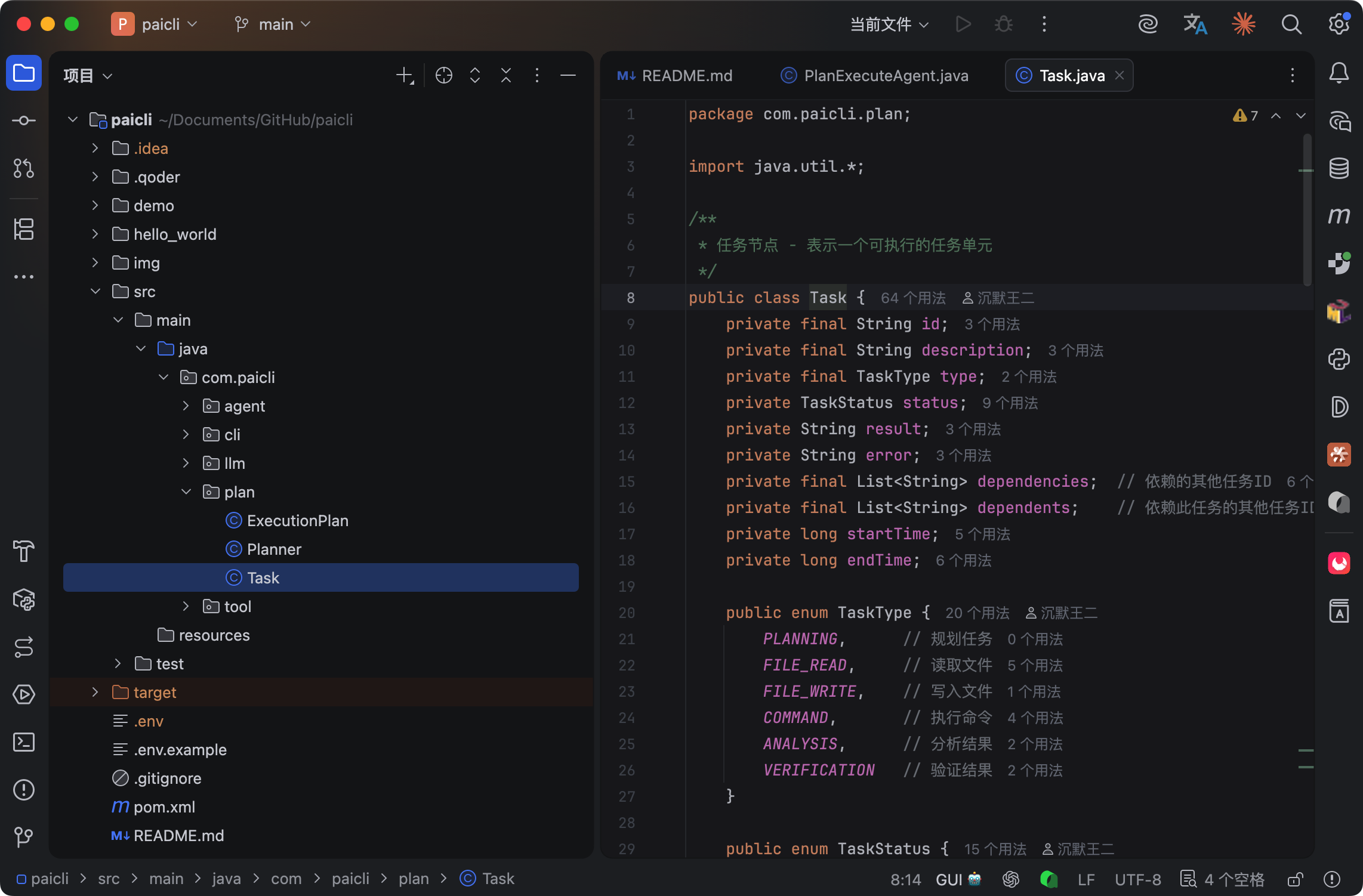
Task 类设计
public class Task {
private final String id; // 任务唯一标识
private final String description; // 任务描述
private final TaskType type; // 任务类型
private TaskStatus status; // 执行状态
private String result; // 执行结果
private String error; // 错误信息
private final List<String> dependencies; // 依赖的任务ID
private final List<String> dependents; // 被依赖的任务ID
private long startTime; // 开始时间
private long endTime; // 结束时间
}
任务类型我们定义了 6 种:
PLANNING:规划任务,用于分析和决策FILE_READ:读取文件,获取信息FILE_WRITE:写入文件,输出结果COMMAND:执行命令,编译运行等ANALYSIS:分析结果,中间决策VERIFICATION:验证结果,检查正确性
任务状态有 5 种:
PENDING:等待执行RUNNING:执行中COMPLETED:已完成FAILED:执行失败SKIPPED:被跳过(依赖失败)
任务的生命周期
一个任务从创建到完成,完整的生命周期如下所示:
PENDING → RUNNING → COMPLETED/FAILED/SKIPPED
每个状态转换都有对应的方法:
public void markStarted() {
this.status = TaskStatus.RUNNING;
this.startTime = System.currentTimeMillis();
}
public void markCompleted(String result) {
this.status = TaskStatus.COMPLETED;
this.result = result;
this.endTime = System.currentTimeMillis();
}
public void markFailed(String error) {
this.status = TaskStatus.FAILED;
this.error = error;
this.endTime = System.currentTimeMillis();
}
记录时间戳有两个用途:一是统计执行耗时,二是分析任务瓶颈。如果某个任务总是耗时很长,可能需要优化或者拆分。
依赖关系
复杂任务有先后依赖。比如“写代码”依赖“创建项目”,“运行”依赖“编译”。
我们用 DAG(有向无环图)表示依赖关系:
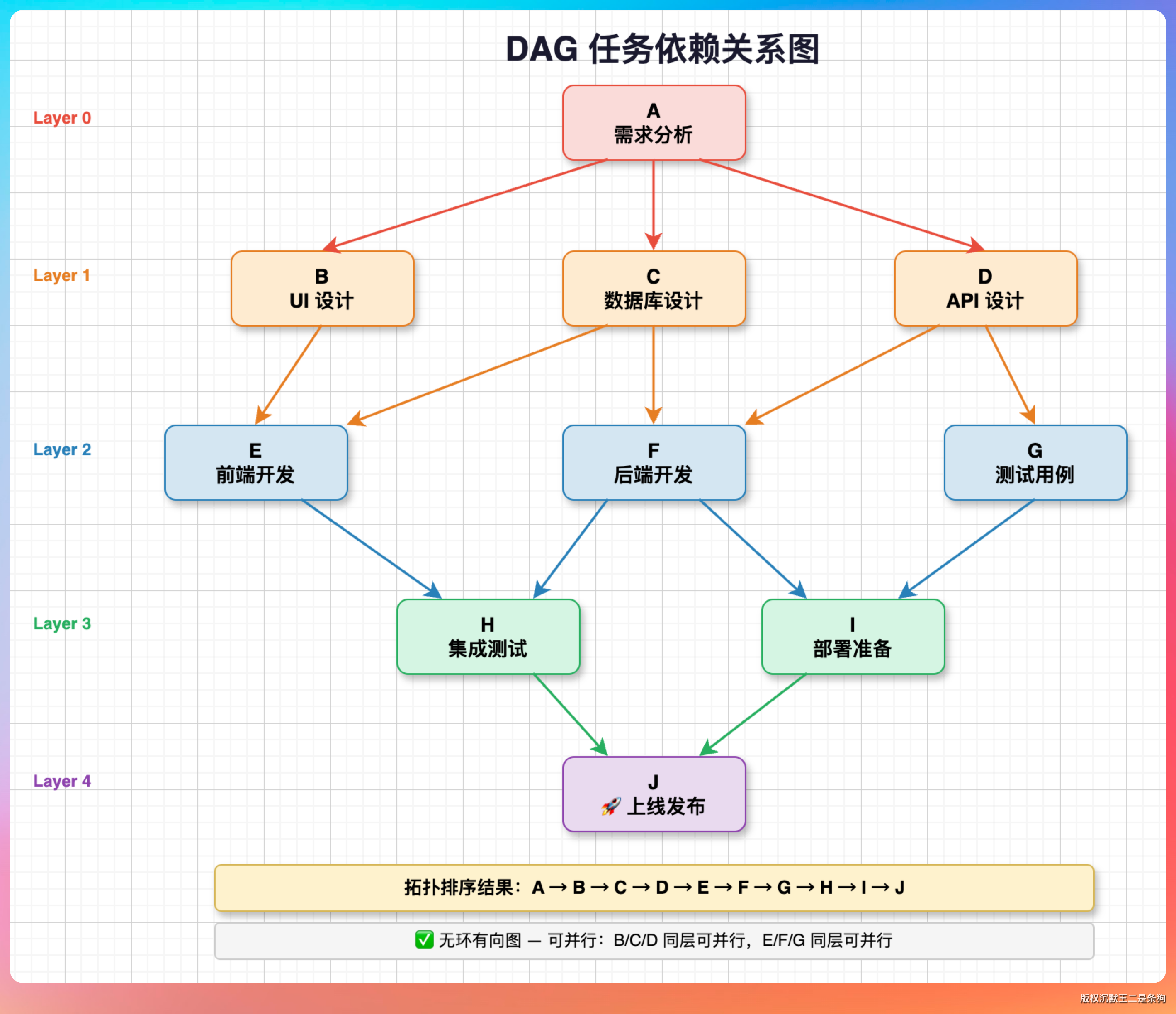
每个任务可以声明自己依赖哪些任务(dependencies),系统会自动计算出执行顺序。
依赖关系的核心方法是 isExecutable:
public boolean isExecutable(Map<String, Task> allTasks) {
if (status != TaskStatus.PENDING) return false;
for (String depId : dependencies) {
Task dep = allTasks.get(depId);
if (dep == null || dep.getStatus() != TaskStatus.COMPLETED) {
return false;
}
}
return true;
}
只有当所有依赖都已完成时,任务才可以执行。这个简单的检查保证了执行顺序的正确性。
任务类型我们定义了 6 种:
PLANNING:规划任务FILE_READ:读取文件FILE_WRITE:写入文件COMMAND:执行命令ANALYSIS:分析结果VERIFICATION:验证结果
依赖关系
复杂任务有先后依赖。比如“写代码”依赖“创建项目”,“运行”依赖“编译”。
我们用 DAG(有向无环图)来表示依赖关系:
每个任务可以声明自己依赖哪些任务(dependencies),系统会自动计算出执行顺序。
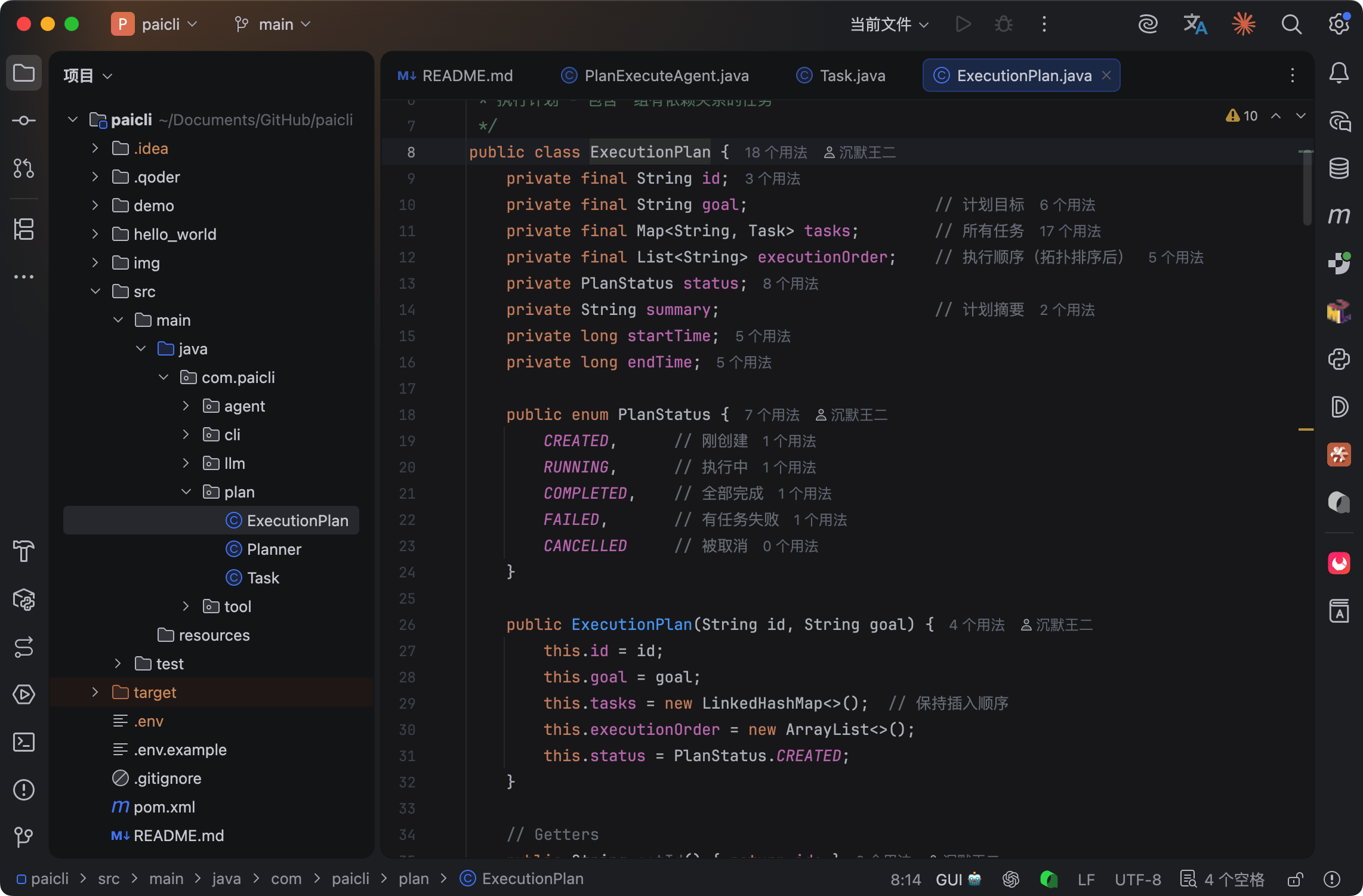
执行计划
多个任务可以组成一个执行计划:
public class ExecutionPlan {
private final String id;
private final String goal; // 计划目标
private final Map<String, Task> tasks; // 所有任务
private final List<String> executionOrder; // 执行顺序
private PlanStatus status;
private String summary;
}
拓扑排序算法
核心方法是 computeExecutionOrder(),使用拓扑排序算法把 DAG 转换成线性执行顺序。
拓扑排序的基本思想是:
- 找到所有入度为 0 的节点(没有依赖的任务)
- 把这些节点加入结果列表
- 移除这些节点及其出边
- 重复 1-3,直到所有节点都处理完
我们用 DFS 算法来实现:
public boolean computeExecutionOrder() {
executionOrder.clear();
Set<String> visited = new HashSet<>();
Set<String> visiting = new HashSet<>();
for (Task task : tasks.values()) {
if (!visited.contains(task.getId())) {
if (!topologicalSort(task, visited, visiting)) {
return false; // 有环
}
}
}
Collections.reverse(executionOrder);
return true;
}
private boolean topologicalSort(Task task, Set<String> visited, Set<String> visiting) {
String id = task.getId();
if (visiting.contains(id)) {
return false; // 有环,排序失败
}
if (visited.contains(id)) {
return true;
}
visiting.add(id);
// 递归处理所有依赖
for (String depId : task.getDependencies()) {
Task dep = tasks.get(depId);
if (dep != null) {
if (!topologicalSort(dep, visited, visiting)) {
return false;
}
}
}
visiting.remove(id);
visited.add(id);
executionOrder.add(id);
return true;
}
算法用两个集合来跟踪状态:visiting 是当前递归栈中的节点,用于检测环;visited 是已处理完的节点,用于避免重复处理。
如果检测到环(visiting.contains(id)),说明任务依赖关系有问题,比如 A 依赖 B,B 依赖 C,C 又依赖 A。这种情况下计划无法执行,需要报错提醒。
计划状态管理
执行计划本身也有状态:
CREATED:刚创建,还没开始执行RUNNING:正在执行中COMPLETED:所有任务都完成FAILED:有任务失败CANCELLED:被取消
状态转换由执行结果决定:
public void markStarted() {
this.status = PlanStatus.RUNNING;
this.startTime = System.currentTimeMillis();
}
public void markCompleted() {
this.status = PlanStatus.COMPLETED;
this.endTime = System.currentTimeMillis();
}
public boolean hasFailed() {
return tasks.values().stream()
.anyMatch(t -> t.getStatus() == TaskStatus.FAILED);
}
计划级别的状态让用户能快速了解整体执行情况,不需要逐个检查任务。
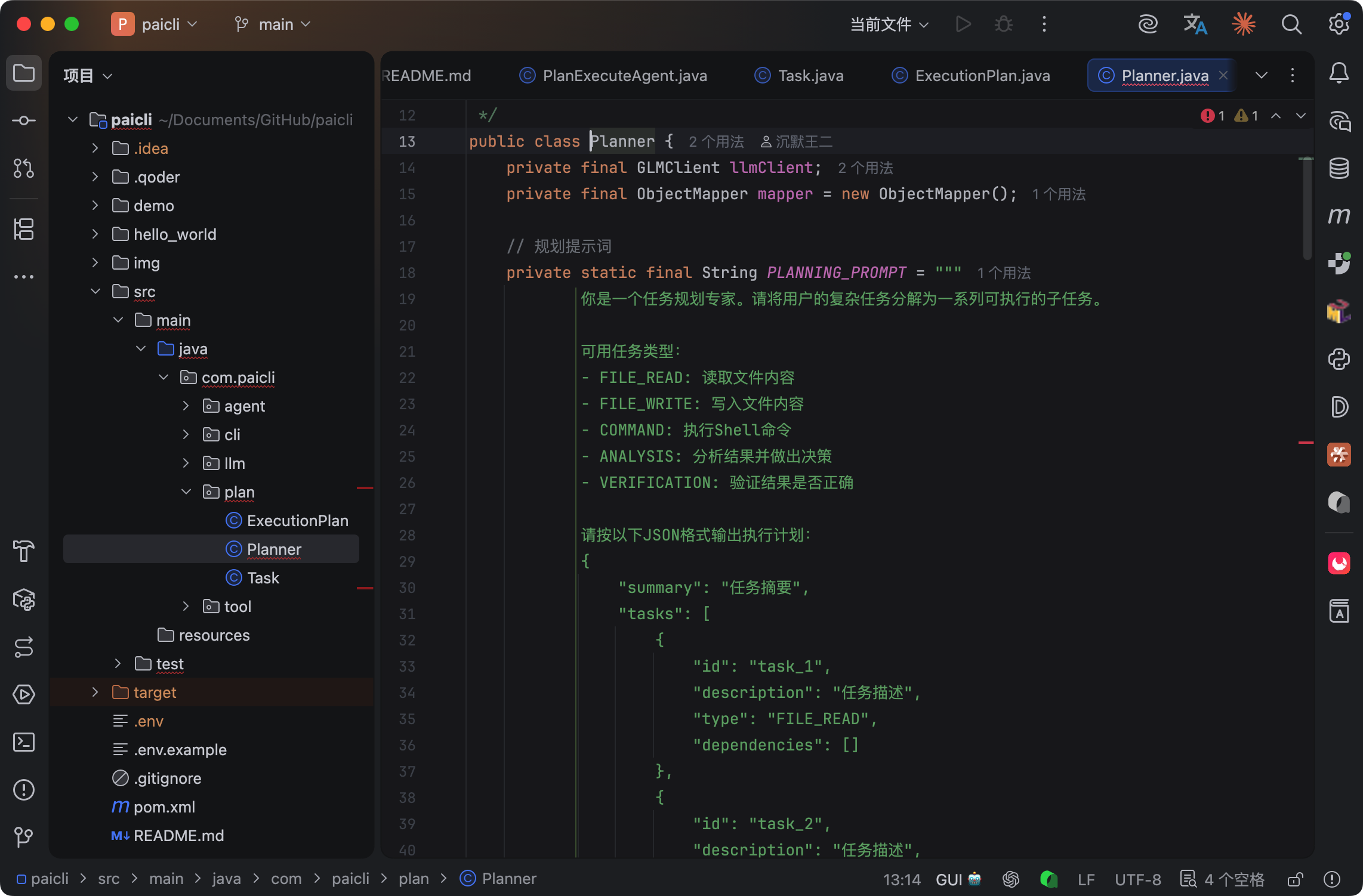
03、规划器实现
规划器负责把用户输入的复杂任务分解成可执行的计划。
public class Planner {
private final GLMClient llmClient;
public ExecutionPlan createPlan(String goal) throws IOException {
// 1. 构建规划提示
List<Message> messages = Arrays.asList(
Message.system(PLANNING_PROMPT),
Message.user("请为以下任务制定执行计划:\n" + goal)
);
// 2. 调用 LLM 生成计划
ChatResponse response = llmClient.chat(messages, null);
// 3. 解析 JSON 计划
return parsePlan(goal, response.content());
}
}
规划提示词工程
关键是给 LLM 一个清晰的提示,让它输出标准格式的计划。
提示词设计有几个原则:
第一,明确输出格式。告诉 LLM 必须输出 JSON,并且给出完整示例。
请按以下JSON格式输出执行计划:
{
"summary": "任务摘要",
"tasks": [
{
"id": "task_1",
"description": "任务描述",
"type": "FILE_READ",
"dependencies": []
}
]
}
第二,定义任务类型。列出所有可用的任务类型和用途,让 LLM 知道什么场景用什么类型。
可用任务类型:
- FILE_READ: 读取文件内容,用于获取信息
- FILE_WRITE: 写入文件内容,用于输出结果
- COMMAND: 执行Shell命令,用于编译运行等
- ANALYSIS: 分析结果,用于中间决策
- VERIFICATION: 验证结果,用于检查正确性
第三,给出约束规则。明确任务的粒度、依赖关系的表达方式等。
规则:
1. 每个任务必须有唯一的id(如 task_1, task_2)
2. dependencies列出依赖的任务id
3. 任务应该按执行顺序排列
4. 任务描述要具体明确
5. 复杂任务拆分为5-10个子任务
解析 LLM 输出
LLM 输出 JSON 后,我们需要解析并构建 Task 对象。这里有个细节:LLM 生成的任务 ID 可能重复或格式不统一,我们需要重新映射。
private ExecutionPlan parsePlan(String goal, String planJson) throws IOException {
// 清理可能的 markdown 代码块
String cleaned = planJson.replaceAll("```json\\s*", "")
.replaceAll("```\\s*", "")
.trim();
JsonNode root = mapper.readTree(cleaned);
String summary = root.path("summary").asText();
JsonNode tasksNode = root.path("tasks");
ExecutionPlan plan = new ExecutionPlan(generatePlanId(), goal);
plan.setSummary(summary);
// 第一遍:创建任务,不处理依赖
Map<String, String> idMapping = new HashMap<>();
int taskIndex = 1;
for (JsonNode taskNode : tasksNode) {
String originalId = taskNode.path("id").asText();
String newId = "task_" + taskIndex++;
idMapping.put(originalId, newId);
// 创建任务...
Task task = new Task(newId, description, type);
plan.addTask(task);
}
// 第二遍:处理依赖关系
// ...
}
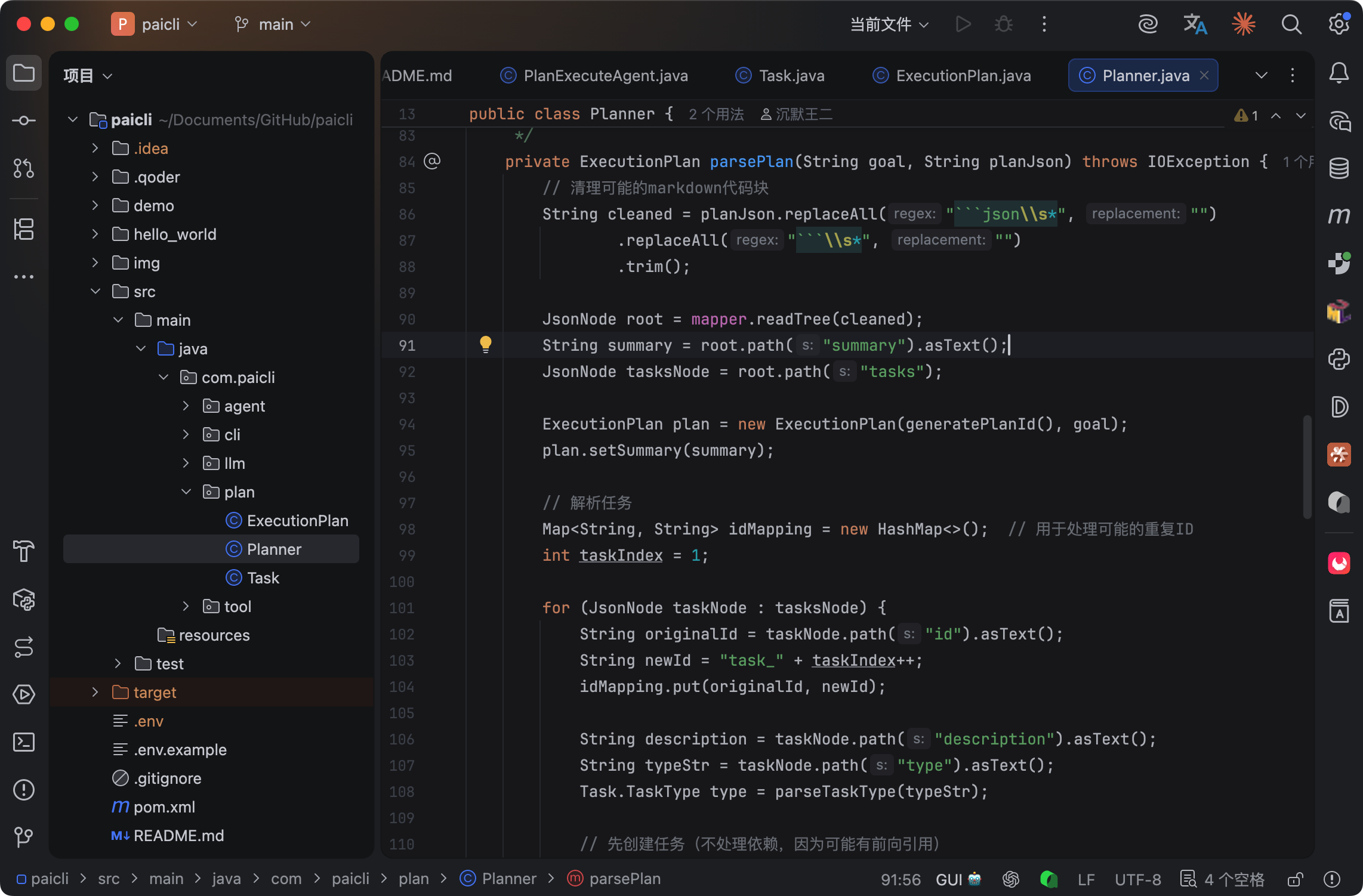
用两遍扫描的原因是:LLM 可能先定义 task_2,再定义 task_1,但 task_2 依赖 task_1。第一遍先创建所有任务,第二遍再建立依赖关系,避免前向引用问题。
重新规划
如果执行过程中某个步骤失败了,可以基于已完成的进度重新规划:
public ExecutionPlan replan(ExecutionPlan failedPlan, String failureReason) {
// 构建上下文:已完成任务 + 失败原因
String context = buildContext(failedPlan, failureReason);
// 重新生成计划
return createPlan(context);
}
这样即使中途出错,也不用从头开始,已完成的任务可以保留。
04、PlanExecuteAgent
现在把规划器和执行器整合起来,实现 PlanExecuteAgent:
public class PlanExecuteAgent {
private final GLMClient llmClient;
private final ToolRegistry toolRegistry;
private final Planner planner;
public String run(String userInput) {
// 1. 创建执行计划
ExecutionPlan plan = planner.createPlan(userInput);
// 2. 显示计划
System.out.println(plan.visualize());
// 3. 执行计划
for (String taskId : plan.getExecutionOrder()) {
Task task = plan.getTask(taskId);
executeTask(task);
}
// 4. 返回结果
return buildResult(plan);
}
}
智能模式切换
简单任务不需要规划。我们加一个启发式判断:
private boolean shouldPlan(String input) {
// 包含多个动作关键词或长度超过50字符,需要规划
String[] keywords = {"创建", "写", "读", "执行", "然后", "接着"};
int actionCount = 0;
for (String keyword : keywords) {
if (input.contains(keyword)) actionCount++;
}
return actionCount >= 3 || input.length() > 50;
}
简单任务用 ReAct,复杂任务用 Plan-and-Execute,自动选择最优模式。
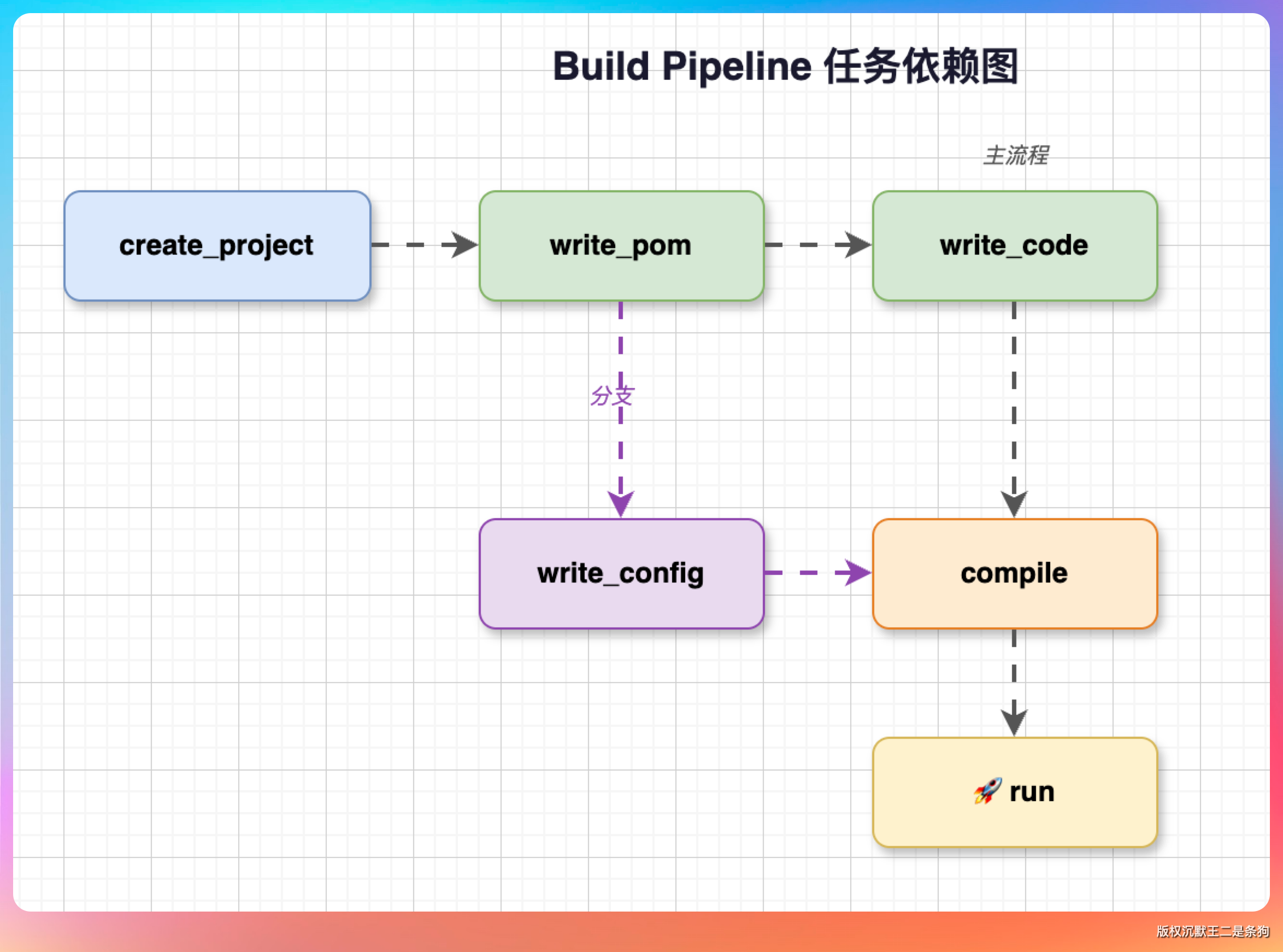
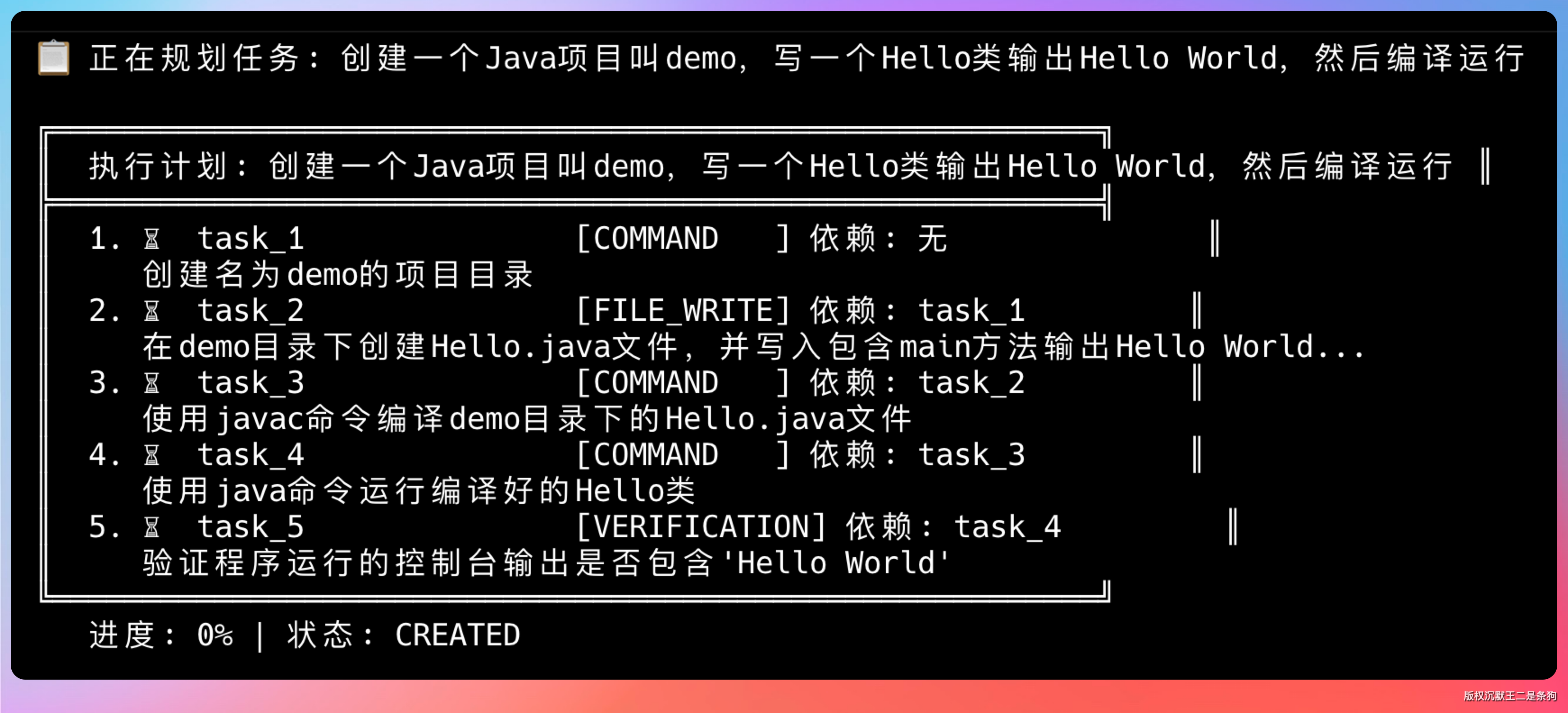
05、计划可视化
执行计划可以可视化展示,让用户清楚知道 Agent 要做什么:
执行过程中实时更新状态图标:⏳ → ▶️ → ✅/❌
06、运行测试
编译运行:
mvn clean package
java -jar target/paicli-1.0-SNAPSHOT.jar
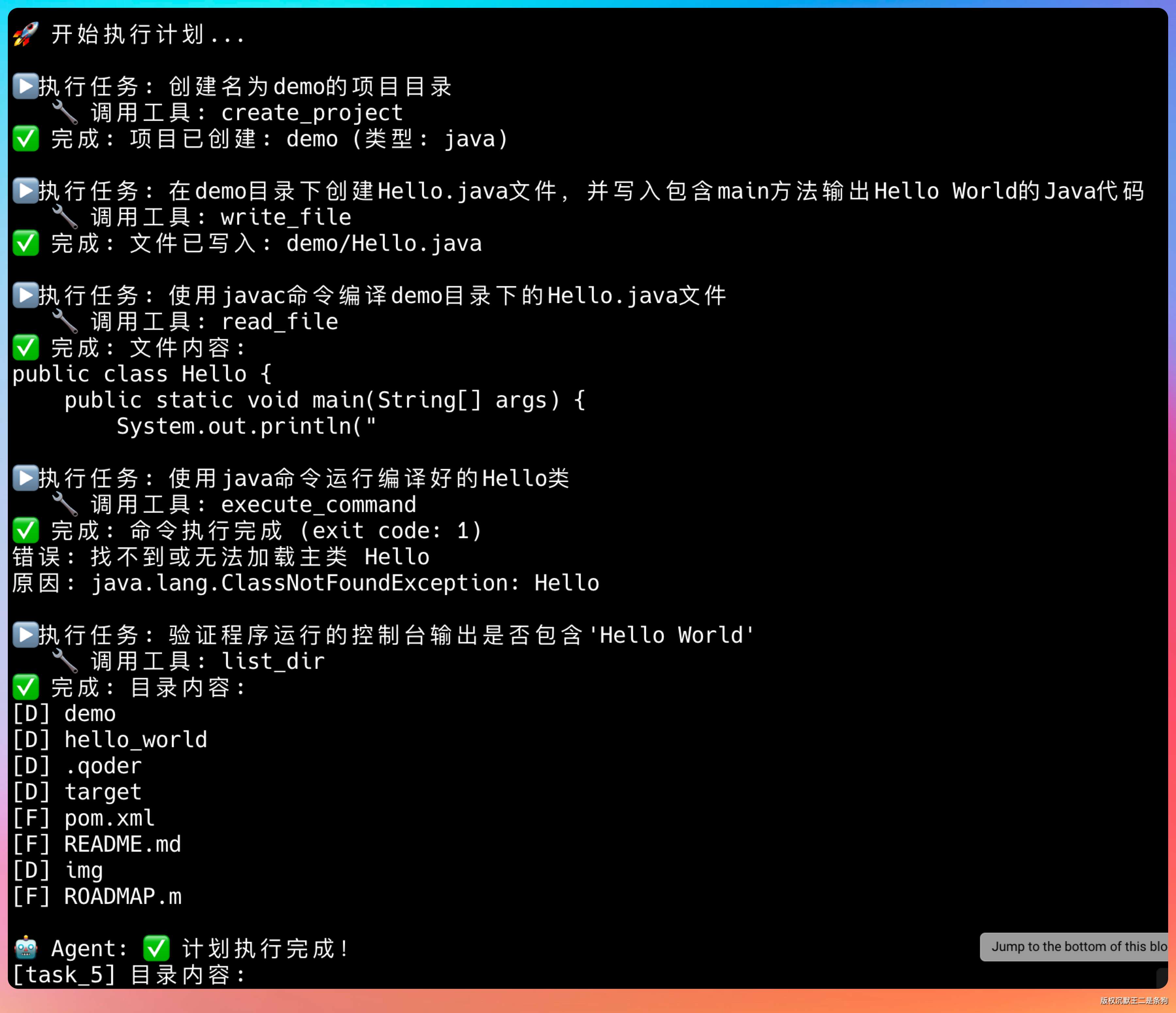
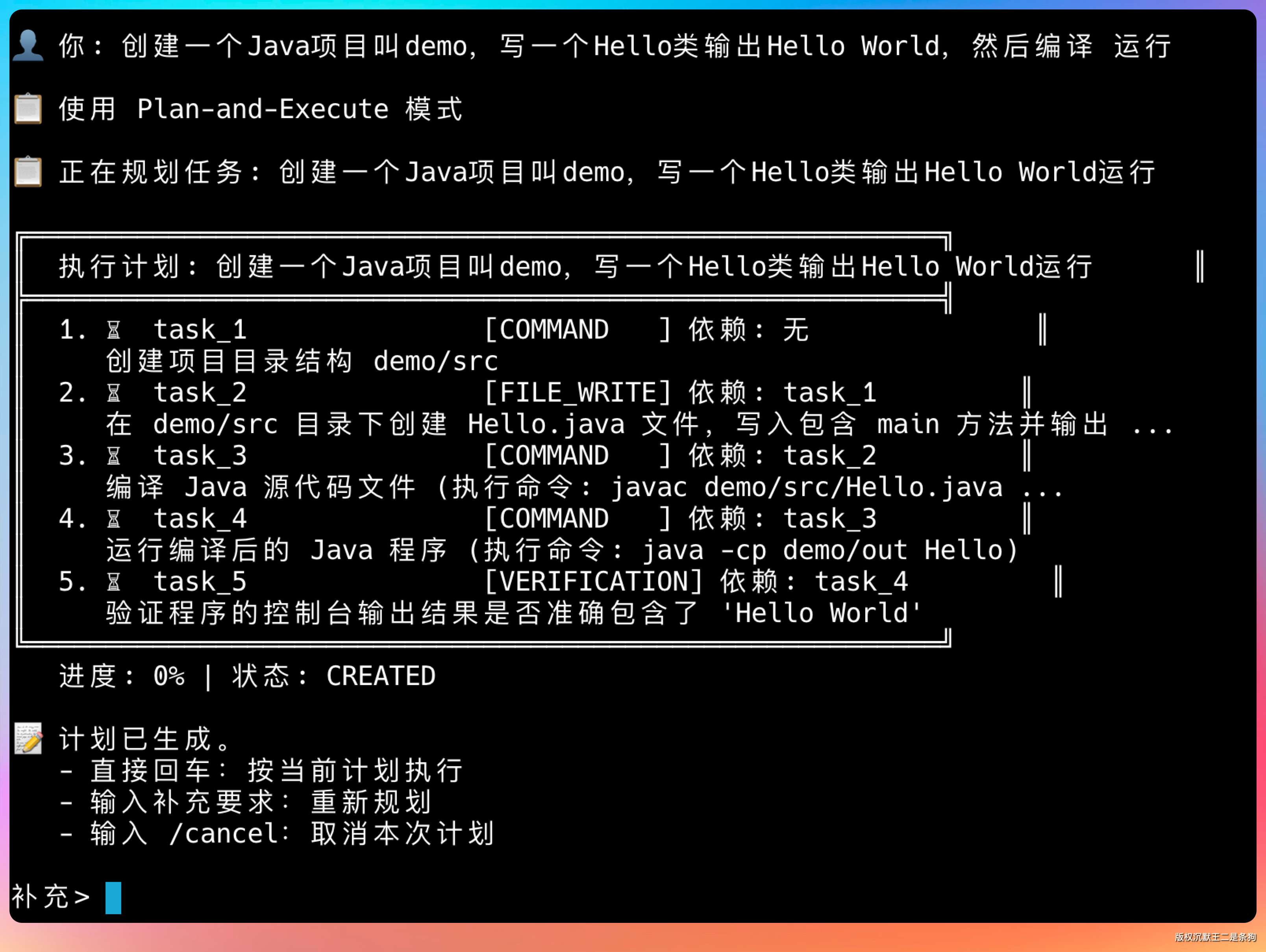
输入 /plan 进入计划模式,然后输入提示词:创建一个 Java 项目叫 demo,写一个 Hello 类输出 Hello World,然后编译运行

规划了 5 个任务,task5 依赖 task4,task4 依赖 task3,task3 依赖 task2,task2 依赖 task1。
然后开始执行计划。
这里我们可以加一个交互,看看用户是否有要补充的,是否要修改计划,然后再开始执行计划。
直接让 Codex 帮我们来补全这一步。
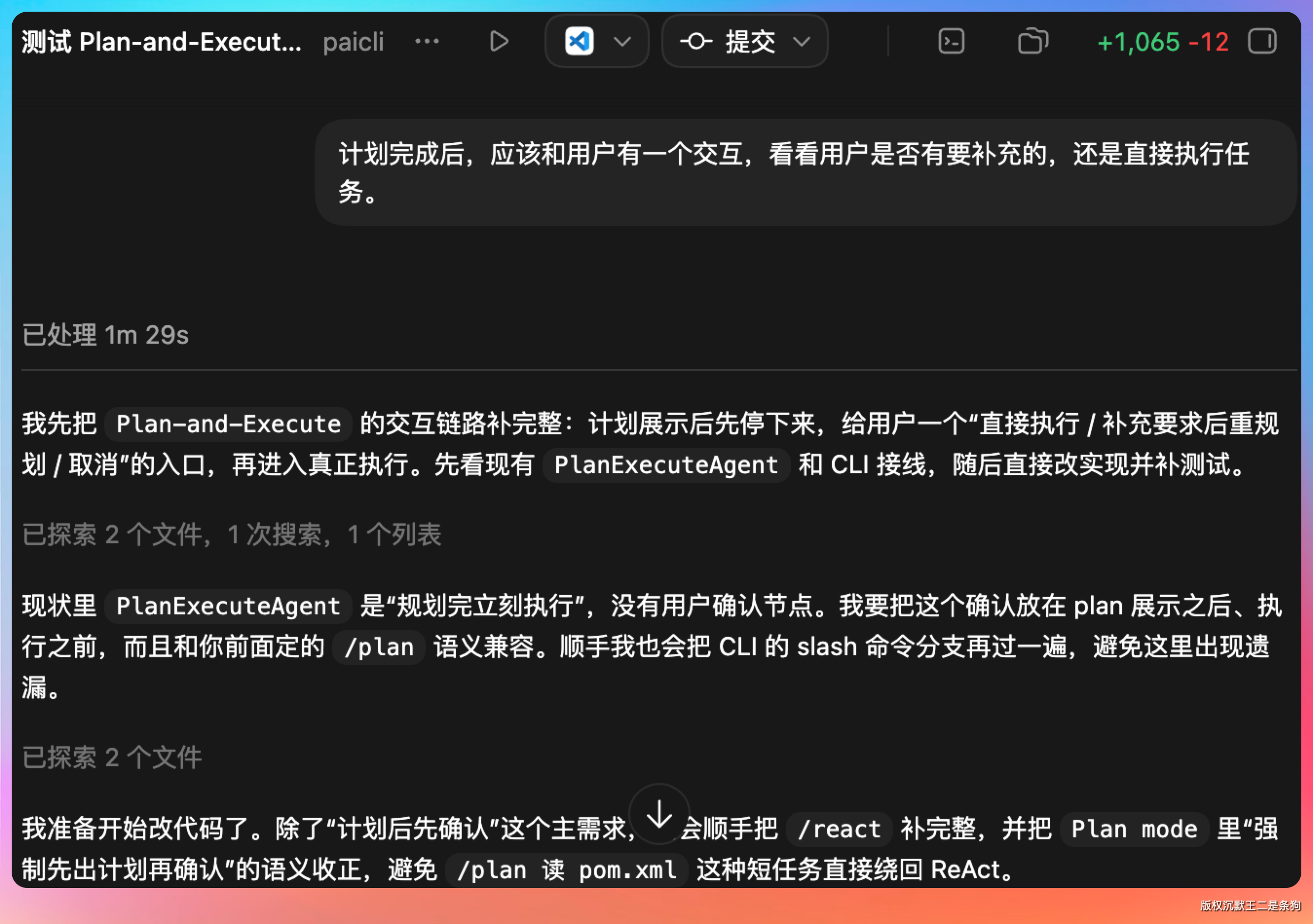
有了。
整个流程清晰可见,每一步都知道在做什么。
07、和 ReAct 的对比
两种模式各有优劣,适用场景不同。
| 特性 | ReAct | Plan-and-Execute |
|---|---|---|
| LLM 调用次数 | 多(每步都调) | 少(只调规划) |
| 执行速度 | 慢(网络往返多) | 快(本地执行多) |
| Token 消耗 | 高 | 低 |
| 灵活性 | 高(随时调整) | 低(按 plan 执行) |
| 可预测性 | 低 | 高 |
| 错误恢复 | 容易(随时改) | 需要重规划 |
| 适用场景 | 简单/探索性任务 | 复杂/确定性任务 |
什么时候用 ReAct
- 任务简单,1-3 步就能完成
- 需要探索性操作,不确定具体步骤
- 用户想看到思考过程
- 需要频繁的人机交互
比如“查看当前目录有什么文件”,直接 ReAct 一步完成。
什么时候用 Plan-and-Execute
- 任务复杂,需要多步操作
- 步骤之间有明确依赖关系
- 追求执行效率
- 需要可预测的执行流程
比如“搭建一个完整的 Web 项目,包括前后端、数据库、部署”,用 Plan-and-Execute 更合适。
混合使用
实际产品中,两种模式可以混合使用:
1. 用 Plan-and-Execute 制定整体计划
2. 每个任务内部用 ReAct 执行
3. 如果某步失败,用 ReAct 分析原因并决定是重试还是重规划
这种混合模式兼顾了效率和灵活性,Claude Code 和 Codex 内部都是类似的架构。
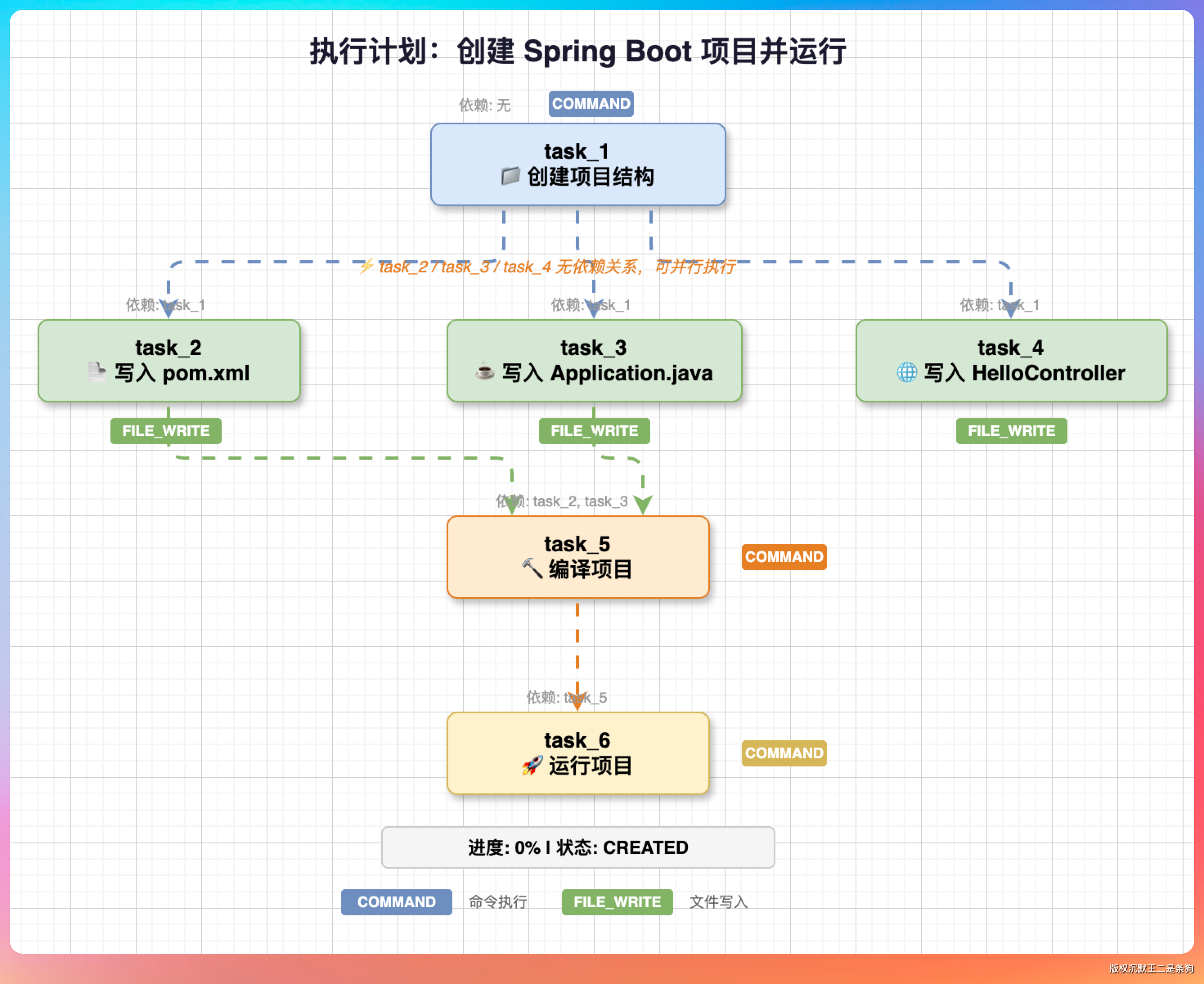
08、进阶:并行执行
当前实现是顺序执行,但 DAG 中无依赖的任务可以并行。
// 获取所有可执行的任务(依赖都已完成)
List<Task> executableTasks = plan.getExecutableTasks();
// 并行执行
List<CompletableFuture<Void>> futures = executableTasks.stream()
.map(task -> CompletableFuture.runAsync(() -> executeTask(task)))
.toList();
// 等待全部完成
CompletableFuture.allOf(futures.toArray(new CompletableFuture[0])).join();
比如“创建项目”和“写 README”可以同时进行,进一步提升效率。
并行执行可能遇到的问题
并行执行可能会遇到这样的问题:
- 资源冲突:两个任务同时写同一个文件,会导致数据丢失。
- 输出混乱:两个任务的日志同时输出,用户看不清哪个是哪个。
- 错误处理复杂:一个任务失败,其他正在执行的任务怎么办?
我们已经实现了哈。
提示词:
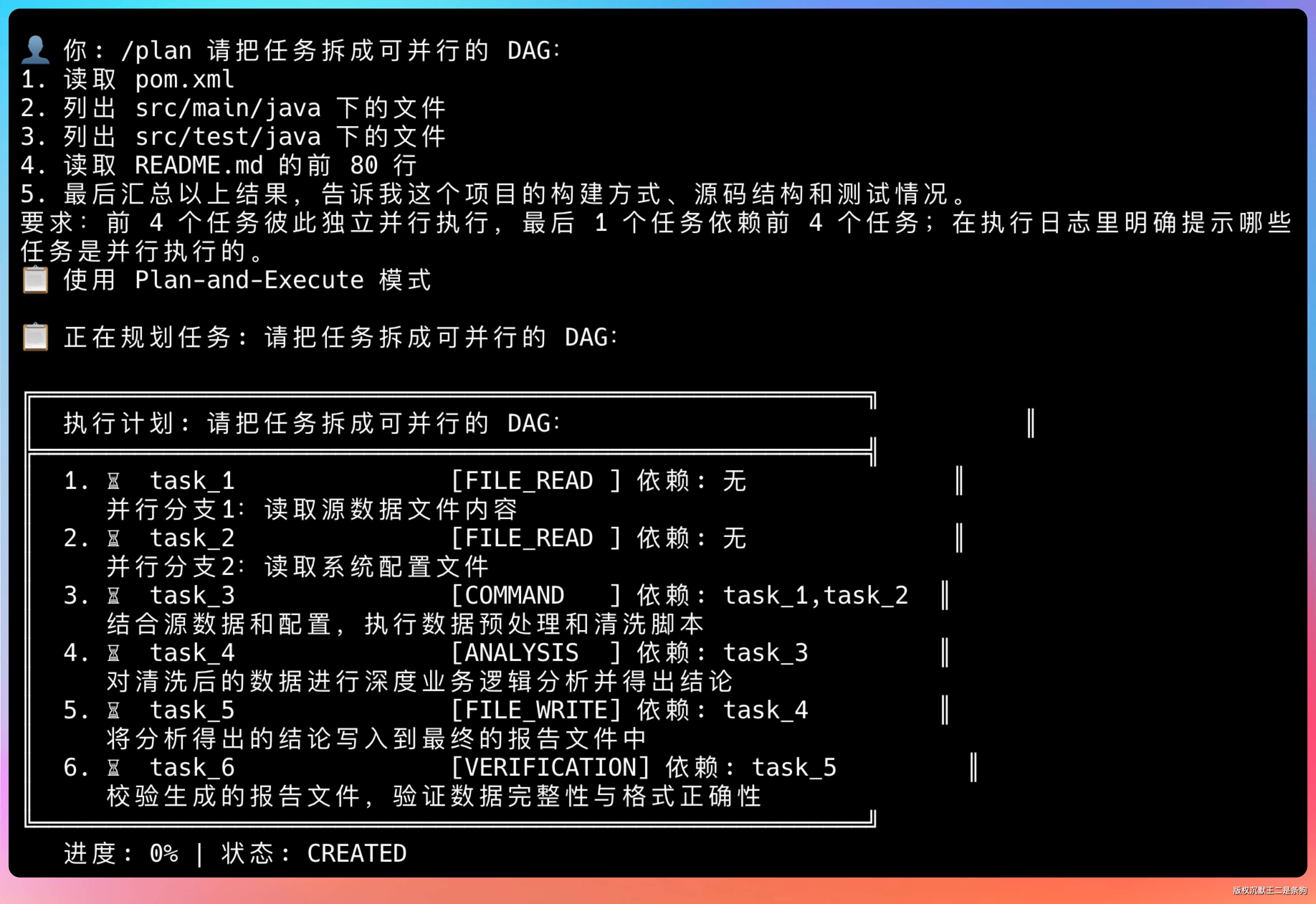
/plan 请把任务拆成可并行的 DAG:
1. 读取 pom.xml
2. 列出 src/main/java 下的文件
3. 列出 src/test/java 下的文件
4. 读取 README.md 的前 80 行
5. 最后汇总以上结果,告诉我这个项目的构建方式、源码结构和测试情况。
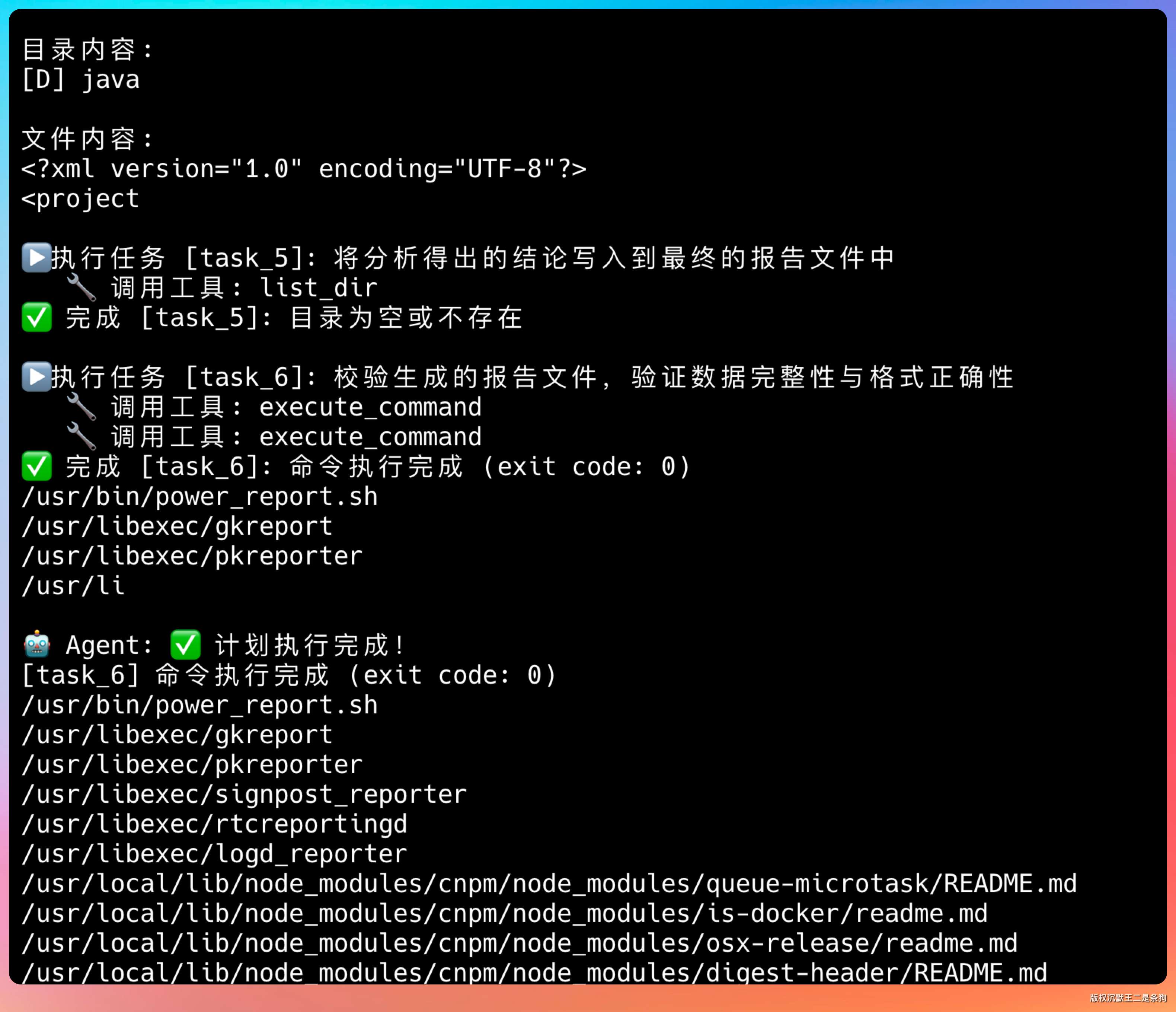
要求:前 4 个任务彼此独立并行执行,最后 1 个任务依赖前 4 个任务;在执行日志里明确提示哪些任务是并行执行的。
开始并行执行任务。
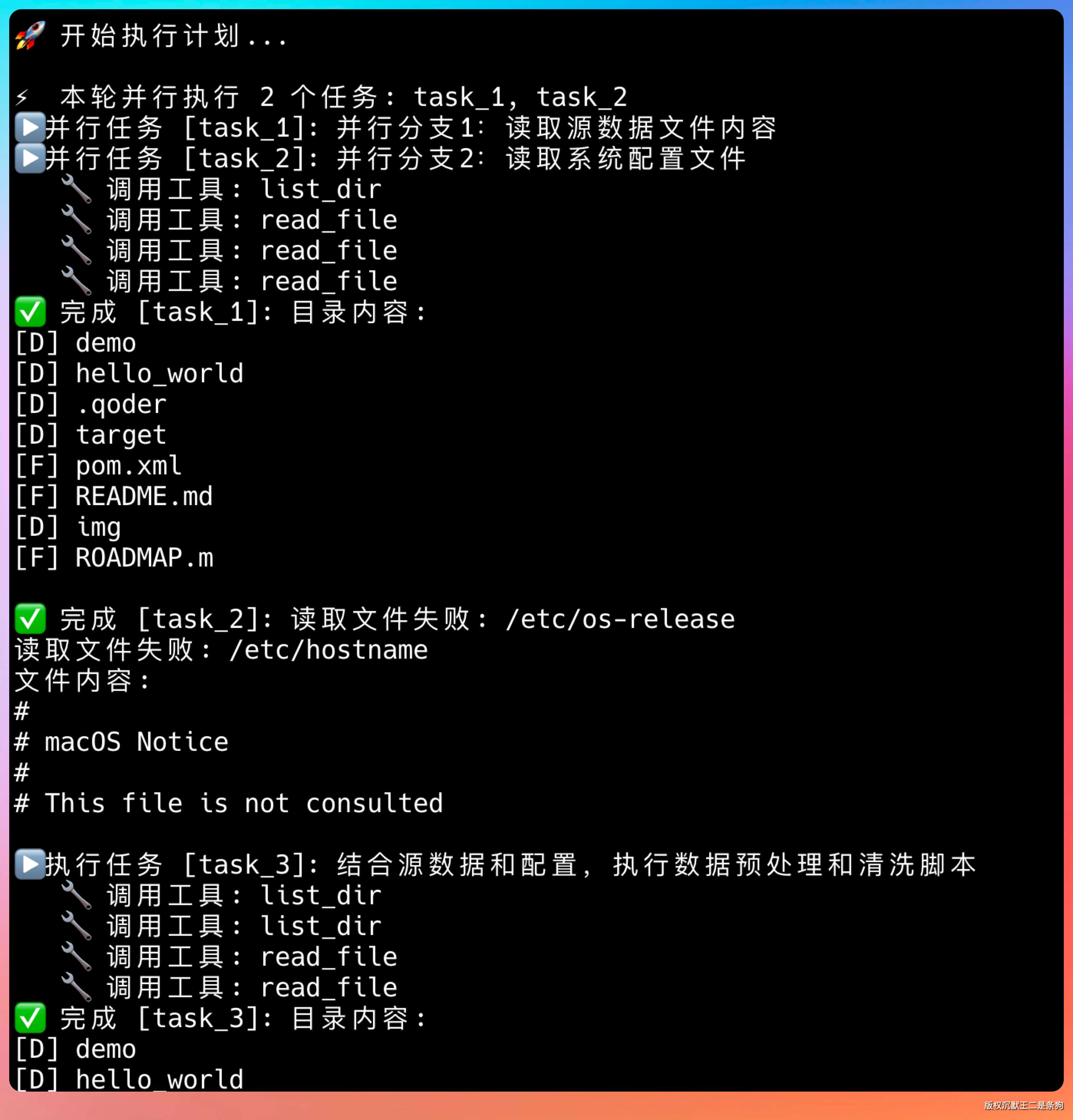
当所有并行任务结束后,开始汇总。
更智能的规划
当前的规划器只调用一次 LLM,生成完整计划。但复杂任务往往需要分层规划:
第一层规划:确定主要阶段
- 阶段1:环境搭建
- 阶段2:核心功能开发
- 阶段3:测试验证
第二层规划:细化每个阶段
- 阶段1包含:安装依赖、配置环境、初始化项目
- 阶段2包含:写模块A、写模块B、集成测试
分层规划的好处是:高层计划稳定,低层计划可以灵活调整。如果某个阶段的详细计划有问题,只需要重规划这个阶段,不影响整体。
规划的自我修正
LLM 制定的计划不一定完美,可能遗漏步骤、顺序错误、依赖不合理。我们需要规划的自我修正机制。
一种方法是规划验证:在执行前,用规则检查计划是否合理。
public List<String> validatePlan(ExecutionPlan plan) {
List<String> errors = new ArrayList<>();
// 检查是否有重复ID
// 检查依赖是否存在
// 检查是否有循环依赖
// 检查任务类型是否合法
return errors;
}
另一种方法是规划反馈:执行几步后,评估计划质量,必要时重新规划。
if (successRate < 0.5) {
// 成功率太低,重新规划
plan = planner.replan(plan, "前序任务成功率低");
}
PaiCLI 如何写到简历上?
PaiCLI 项目(第 2 期)| 2026.04 - 2026.06 | Agent 开发
项目描述:为 Agent CLI 加入 Plan-and-Execute 能力,实现任务分解、DAG 依赖管理和拓扑排序执行。
技术栈:Java 17、Maven、GLM-5.1 API、DAG 拓扑排序、JSON 解析
核心职责:
- 设计 Task 任务模型,实现 6 种任务类型和 5 种状态流转,支持任务依赖双向追踪和 DAG 有向无环图表示
- 实现基于 DFS 的拓扑排序算法,将任务 DAG 转换为线性执行顺序,能自动检测循环依赖并报错,确保任务按顺序执行;并使用线程池并发执行无依赖的多项任务,相比串行执行效率大幅提升
- 开发 Planner 规划器,使用 LLM 将复杂任务分解为 5-10 个可执行子任务,通过 JSON 格式输出计划,实现 ID 映射和前向引用处理
- 实现 PlanExecuteAgent,支持根据任务复杂度自动切换 ReAct 和 Plan-and-Execute 两种模式
- 集成 JLine3 实现交互式命令行界面,支持命令历史(上下箭头)、Tab 自动补全、行编辑和语法高亮,用户体验接近原生 Shell


回复